Бойова роботизована платформа «ЛАСКА»
 Рис.1 Мобільна бойова роботизована платформа «ЛАСКА»
Рис.1 Мобільна бойова роботизована платформа «ЛАСКА»
Запорізькою компанією запропоновано концепцію створення наземної бойової роботизованої платформи (БРП) «ЛАСКА» - як одного з елементів комплексу безпілотних наземних транспортних засобів військового призначення, що рекомендується до застосування в механізованих (мотопіхотних) частинах Сухопутних військ ЗС України.
Платформа розроблена в рамках власної інноваційної програми компанії «Інфоком Лтд» (Запоріжжя) та заснована на більш ніж 20-річному досвіді створення та впровадження складних систем автоматизації технологічних процесів в різних галузях промисловості, розробки і модернізації унікальних п'яти-координатних верстатів ЧПК, робототехнічних комплексів.
Мета розробки БРП «ЛАСКА» - створення ефективної мобільної роботизованої платформи з автоматичною туреллю для виконання оперативно-тактичних бойових дій, а також охорони і захисту периметра заданої території, виявлення та запобігання спробам порушників несанкціонованого проникнення на територію, що охороняється.
Полігонні випробування роботизованої платформи з автоматизованою туреллю «ЛАСКА» пройшли на військовому полігоні «Близнюки» в Запорізькій області.
Laska robotized platform
Результати випробувань підтвердили правильність обраної концепції нарощування ефективності стрілецької зброї шляхом його комплексування до складу бойових систем на базі безпілотних наземних транспортних засобів (БНТС).
Бойова роботизована платформа «ЛАСКА» конструктивно реалізована у вигляді автоматизованої турелі з установкою на ній 7,62-мм ПКМ, і запропонована в двох варіантах виконання: стаціонарному - FP01, і варіанті MP01 - для застосування на бойовому транспортному засобі.
Turret Laska Kiev 2016
Реалізація бойової платформи MP01 на базі БНТС підвищує ефективність використання турелі шляхом збільшення маневреності та функціональності, зокрема забезпечує можливість супроводу при виконанні бойових завдань підрозділу в русі (розвідка, розмінування, бойова охорона, наступ, патрулювання місцевості, передислокація, супровід вантажів, евакуація поранених тощо).
Для відпрацювання функціональних завдань бойової роботизованою платформи в якості базового транспортного засобу було використано шасі квадроцикла (Рис. 1).
Технічні характеристики (вибірково)
- Колісна формула: 4х2
- Силовий агрегат: одноциліндровий 4-тактний двигун
- Потужність агрегату: 19 к.с. (14 кВт)
- Напруга бортової мережі: 12 В
- Матеріал платформи: сталь
- Ступінь захисту поворотної платформи: > IP65
- Розмір (ДхШхВ): 1895х1069х1350 мм
- База, мм 1 199
- Кліренс: 136 мм
- Запас ходу: 100 км
- Максимальна швидкість: 80 км/год
- Маса: 310 кг
Управління БРП «ЛАСКА», з використанням засобів захисту від впливу радіоелектронних систем противника на канали зв'язку, здійснюється дистанційно:
- з планшета (радіоканал, f = 433 МГц - дистанція 300 м);
- з операторської станції (AirMax, f = 5ГГц - до5000 м);
- жестами (відеоканал - дистанція прямої видимості);
- в режимі «електронний трос» (відеоканал - дистанція прямої видимості);
- за допомогою електронної рукавички (радіоканал, f = 868 МГц - дистанція 300 м);
- голосом, з подачею команд в мікрофон (радіоканал, f = 433 МГц - дистанція 300 м);
Автономний рух БРП. Відпрацьовуються режими:
- рух по азимутальної маршруту з верифікацією реперних точок по GPS-каналу (Рис.2);
- запам'ятовування (автофіксація) маршруту;
- рух по зафіксованому маршруту;
- рух по схемі «додому» - по зафіксованому маршруту (повернення в вихідну точку);
- рух в колоні (режим «ведений» / «провідний»).
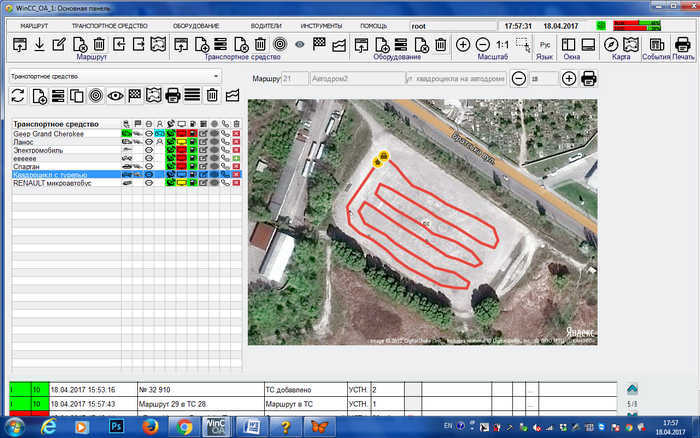 Рис.1 Скріншот відеокадру WINCC OA системи управління рухом по азимутальної маршруту з верифікацією реперних точок.
Рис.1 Скріншот відеокадру WINCC OA системи управління рухом по азимутальної маршруту з верифікацією реперних точок.
Організаційно-технічну основу управління наземної бойової роботизованою платформи «ЛАСКА» становить система управління і диспетчеризації БРП, реалізована на базі стаціонарного пункту управління (СПУ) або мобільного (МПУ).
Мобільний пункт управління призначений для отримання даних (координат цілей) від радіолокаційної і оптико-електронної системи розвідки БРП, прийому високоточних навігаційних даних від супутникової навігаційної системи GPS, передачі високоточних навігаційних даних в БРП, автоматизованого введення даних (метеорологічних, маршрутних, координат цілей) в центральний блок керування та навігації БРП, зберігання ідентифікаційних даних і електронних навігаційних карт, організації зв'язку і управління вогнем БРП, завдання периметрів охорони об'єкту та параметрування БРП. Управління та відстеження БРП ведеться з автоматизованого робочого місця (АРМ) оператора мобільного пункту управління.
Система візуалізації і управління АРМ оператора реалізована базі SCADA системи з відкритою архітектурою WinCC OA фірми SIEMENS, в обсязі таких функцій:
- конфігурація обладнання бойової роботизованою платформи (Рис.3) на базі засобів спостереження і розвідки: відеокамери широкого і вузького поля зору, лазерний далекомір, УЗ-датчики ближньої і дальньої локації, інерціальні датчики, датчики GPS, системи зв'язку, (опціонно роботизована платформа комплектується тепловізором і стерео-камерою);
- параметрування завдань;
- завдання маршруту по карті із застосуванням ГІС систем;
- передача маршруту;
- трекінг БРП;
- здійснення контролю за технічним обслуговуванням і ремонтом обладнання (ТОРО) роботизованих платформ;
- ведення статистики зі збереженням всієї історії оперативних даних і маршрутів по кожній роботизованою платформі в базі даних Postgres, що представляє собою вільно об'єктно-реляційну систему управління базами даних (СКБД).
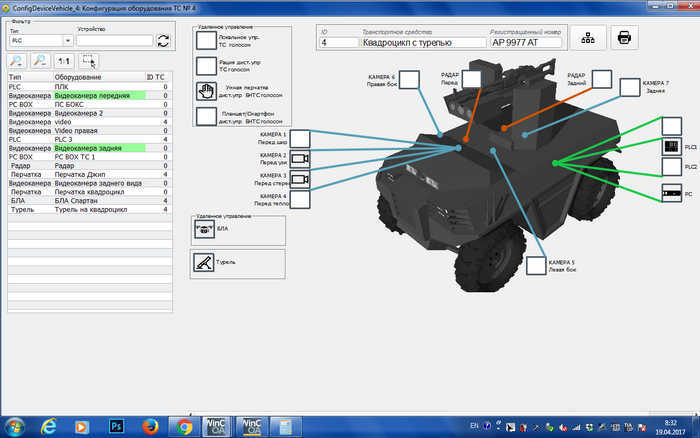 Рис.3 Скріншот видеокадру WINCC OA конфігурації обладнання роботизованою платформи
Рис.3 Скріншот видеокадру WINCC OA конфігурації обладнання роботизованою платформи
Реалізація системи управління БРП «ЛАСКА» на базі програмно-технічних засобів єдиної комп'ютерної платформи, забезпечує ефективне синхронне управління рухом і вогнем. Закладені в системі обчислювальні ресурси достатні для нарощування в перспективі рівня автономності БРП - що відповідає загальновизнаним тенденціям розвитку БНТС.
Весь комплекс наявних засобів і можливостей управління безпілотними роботизованими платформами для виконання оперативно-тактичних дій представлений на Рис.4.
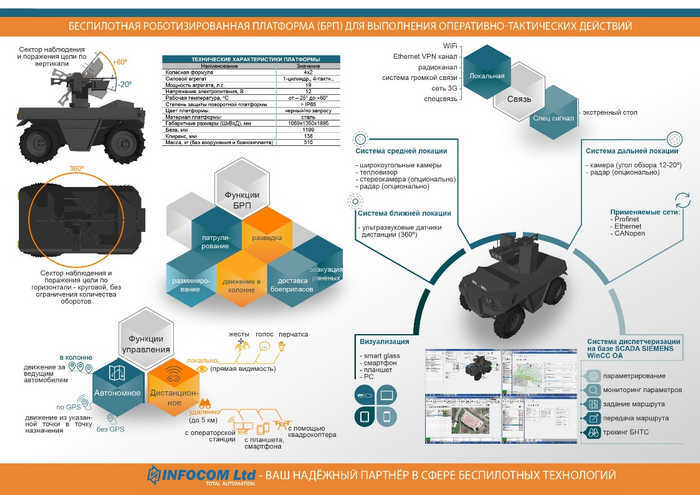 Рис.4 Комплекс засобів управління безпілотної роботизованою платформою (російською)
Рис.4 Комплекс засобів управління безпілотної роботизованою платформою (російською)
І скільки це задоволення буде коштувати?
Начинка нічого так, а от розміщення на базі квадроцикла та ще з формулою 4х2, як на мене, не доцільно. Погана прохідність, погана стійкість. Або ж хоча б розширити колію.
Будь ласка, залогіньтесь щоб мати можливість коментувати